Calendar
Abstract
The humanoid robot DURUS was unveiled to the public in the midst of the DARPA Robotics Challenge (DRC). While the main competition took place in the stadium, DURUS took part in the Robot Endurance Test with the goal of demonstrating locomotion that is an order of magnitude more efficient than existing bipedal walking on humanoid robots, e.g., the ATLAS robot utilized in the DRC. During this accessible public demonstration of humanoid robotic walking, DURUS walked continuously for over 2½ hours covering over 2 km—all on a single 1.1 kWh battery. At the core of this success was a methodology for designing and realizing dynamic and efficient walking gaits on bipedal robots through a mathematical framework that utilizes hybrid systems models coupled with nonlinear controllers that provably result in stable locomotion. This mathematical foundation allowed for the full utilization of novel mechanical components of DURUS, including: efficient cycloidal gearboxes (allowing for almost lossless transmission of power) and compliant elements at the ankles (absorbing the impacts at foot-strike). Through this combination of formal controller design and novel mechanical design, the humanoid robot DURUS was able to achieve the most efficient walking ever recorded on a humanoid robot. This talk will outline the key elements of the methodology used to achieve this result, demonstrate the extensibility to other bipedal robots and robotic assistive devices, e.g., prostheses, and consider the question: when will the humanoid robots of science fiction become science fact?
Speaker Bio
Aaron D. Ames joined the Georgia Institute of Technology in July 2015 as an Associate Professor in the George W. Woodruff School of Mechanical Engineering and the School of Electrical and Computer Engineering. Prior to joining Georgia Tech, he was an Associate Professor and Morris E. Foster Faculty Fellow II in Mechanical Engineering at Texas A&M University, with joint appointments in Electrical & Computer Engineering and Computer Science & Engineering. Dr. Ames received a B.S. in Mechanical Engineering and a B.A. in Mathematics from the University of St. Thomas in 2001, and he received a M.A. in Mathematics and a Ph.D. in Electrical Engineering and Computer Sciences from UC Berkeley in 2006. He served as a Postdoctoral Scholar in Control and Dynamical Systems at the California Institute of Technology from 2006 to 2008. At UC Berkeley, he was the recipient of the 2005 Leon O. Chua Award for achievement in nonlinear science and the 2006 Bernard Friedman Memorial Prize in Applied Mathematics. Dr. Ames received the NSF CAREER award in 2010 for his research on bipedal robotic walking and its applications to prosthetic devices, and is the recipient of the 2015 Donald P. Eckman Award recognizing an outstanding young engineer in the field of automatic control. His lab designs, builds and tests novel bipedal robots, humanoids and prostheses with the goal of achieving human-like bipedal robotic walking and translating these capabilities to robotic assistive devices.

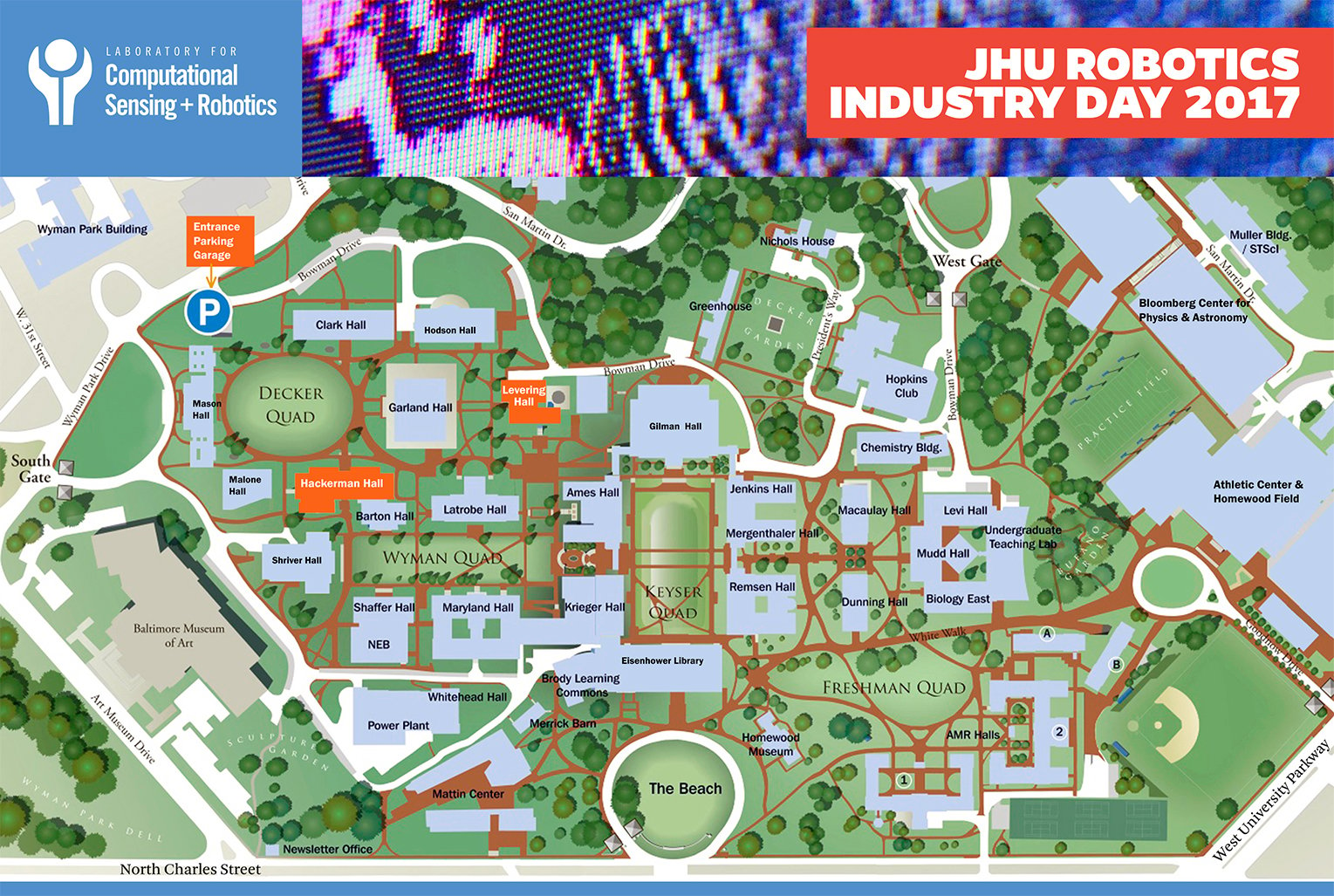
The Laboratory for Computational Sensing and Robotics will highlight its elite robotics students and showcase cutting-edge research projects in areas that include Medical Robotics, Extreme Environments Robotics, Human-Machine Systems for Manufacturing, BioRobotics and more. JHU Robotics Industry Day will take place from 8 a.m. to 3 p.m. in Hackerman Hall on the Homewood Campus at Johns Hopkins University.
Robotics Industry Day will provide top companies and organizations in the private and public sectors with access to the LCSR’s forward-thinking, solution-driven students. The event will also serve as an informal opportunity to explore university-industry partnerships.
You will experience dynamic presentations and discussions, observe live demonstrations, and participate in speed networking sessions that afford you the opportunity to meet Johns Hopkins most talented robotics students before they graduate.
Please contact Rose Chase if you have any questions.
Schedule of Events
(times are subject to change)
LEVERING GREAT HALL
8:00 Registration and Continental Breakfast
8:30 Welcome: Larry Nagahara, Associate Dean for Research, JHU
8:35 Introduction to LCSR: Director Russell H. Taylor
8:55 Research and Commercialization Highlights
9:00 Louis Whitcomb, LCSR
9:10 Noah Cowan & Erin Sutton, LCSR
9:20 Marin Kolilarov, LCSR
9:30 Philipp Stolka, Clear Guide Medical
9:40 Mehran Armand, APL and LCSR
9:50 Stephen L. Hoffman, Sanaria, Inc.
10:00 COFFEE BREAK
10:10 Bernhard Fuerst, LCSR
10:20 Bruce Lichorowic, Galen Robotics
10:30 David Narrow, Sonavex, Inc.
10:40 Kelleher Guerin & Benjamin Gibbs, READY Robotics
10:50 Promit Roy, Max and Haley LLC
11:00 John Krakauer, Malone Center for Engineering in Healthcare Update, JHU
11:10 New Faculty Talks
11:10 – Muyinatu Bell
11:30 – Jeremy D. Brown
HACKERMAN HALL B17 LOBBY
12:00-1:15 LUNCH
HACKERMAN HALL ROBOTORIUM
12:00-1:15 Poster + Demo Sessions
HACKERMAN HALL B17
1:15-3:00 Student and Industry Speed Networking
Please contact Rose Chase if you have any questions. Download PDF of Campus Map & Schedule of Events
Abstract
This is the Fall 2017 Kick-Off Seminar, presenting an overview of LCSR, useful information, and an introduction to the faculty and labs.
Abstract
Robots hold promise in assisting people in a variety of domains including healthcare services, household chores, collaborative manufacturing, and educational learning. In supporting these activities, robots need to engage with humans in cooperative interactions in which they work together toward a common goal in a socially intuitive manner. Such interactions require robots to coordinate actions, predict task intent, direct attention, and convey relevant information to human partners. In this talk, I will present how techniques in human-computer interaction, artificial intelligence, and robotics can be applied in a principled manner to create and study intuitive interactions between humans and robots. I will demonstrate social, cognitive, and task benefits of effective human-robot teams in various application contexts. I will discuss broader impacts of my research, as well as future directions of my research focusing on intuitive computing.
Bio
Chien-Ming Huang is an Assistant Professor of Computer Science in the Whiting School of Engineering at The Johns Hopkins University. His research seeks to enable intuitive interactions between humans and machines to augment human capabilities. Dr. Huang received his Ph.D. in Computer Science at the University of Wisconsin–Madison in 2015, his M.S. in Computer Science at the Georgia Institute of Technology in 2010, and his B.S. in Computer Science at National Chiao Tung University in Taiwan in 2006. His research has been awarded a Best Paper Runner-Up at Robotics: Science and Systems (RSS) 2013 and has received media coverage from MIT Technology Review, Tech Insider, and Science Nation.