Calendar
Abstract
Flying robots can operate in three-dimensional, indoor and outdoor environments. However, many challenges arise as we scale down the size of the robot, which is necessary for operating in cluttered environments. I will describe recent work in developing small, autonomous robots, and the design and algorithmic challenges in the areas of (a) control and planning, (b) state estimation and mapping, and (c) coordinating large teams of robots. I will also discuss applications to search and rescue, first response and precision farming. Publications and videos are available at kumarrobotics.org.
Bio
DR. VIJAY KUMAR is the Nemirovsky Family Dean of Penn Engineering with appointments in the Departments of Mechanical Engineering and Applied Mechanics, Computer and Information Science, and Electrical and Systems Engineering at the University of Pennsylvania. Dr. Kumar received his Bachelor of Technology degree from the Indian Institute of Technology, Kanpur and his Ph.D. from The Ohio State University in 1987. He has been on the Faculty in the Department of Mechanical Engineering and Applied Mechanics with a secondary appointment in the Department of Computer and Information Science at the University of Pennsylvania since 1987.
Dr. Kumar served as the Deputy Dean for Research in the School of Engineering and Applied Science from 2000-2004. He directed the GRASP Laboratory,
a multidisciplinary robotics and perception laboratory, from 1998-2004. He was the Chairman of the Department of Mechanical Engineering and Applied Mechanics from 2005-2008. He served as the Deputy Dean for Education in the School of Engineering and Applied Science from 2008-2012. He then served as the assistant director of robotics and cyber physical systems at the White House Office of Science and Technology Policy (2012 – 2013).
Dr. Kumar is a Fellow of the American Society of Mechanical Engineers (2003), a Fellow of the Institution of Electrical and Electronic Engineers (2005) and a member of the National Academy of Engineering (2013). Dr. Kumar’s research interests are in robotics, specifically multi-robot systems, and micro aerial vehicles. He has served on the editorial boards of the IEEE Transactions on Robotics and Automation, IEEE Transactions on Automation Science and Engineering, ASME Journal of Mechanical Design, the ASME Journal of Mechanisms and Robotics and the Springer Tract in Advanced Robotics (STAR).
For More Information or to RSVP please contact Deana Santoni at dsantoni@jhu.edu.
Sponsored by the Department of Mechanical Engineering and the JHU Student Section and the Baltimore Section of the American Society of Mechanical Engineers.
Abstract
For over a decade surgical educators have called for objective, quantitative methods to measure surgical skill. To date, no satisfactory method exists that is simultaneously accurate, scalable, and generalizable. That is, a method whose scores correlate with patient outcomes, can scale to cope with 51 million annual surgeries in the United States, and generalize across the diversity surgical procedures or specialties. This talk will review the promising results of exploiting crowdsourcing techniques to meet this need. The talk will also survey the limitations of this approach, fundamental problems in establishing ground truth for surgical skill evaluation, and steps to exploit surgical robotics data. The talk will conclude by proposing some future robotic approaches that may obviate the need for surgeons to master complex technical skills in the first place.
Bio
Dr. Kowalewski completed his PhD in electrical engineering for “quantitative surgical skill evaluation” at the University of Washington’s Biorobotics lab. This work was recognized with a best doctoral candidate award at the American College of Surgeons AEI Consortium on Surgical Robotics and Simulation. He was also a research scientist at DARPA’s “Traumapod: Operating room of the future” project. He has helped commercialize his PhD work for quantitative skill evaluation hardware (Simulab Corp., Seattle, WA) and also pioneered the use of crowdsourcing for highvolume assessment of surgical skills and cofounded CSATS Inc, Seattle, WA to make these methods available to modern healthcare. This work has been published in JAMA Surgery and formally adopted by the American Urological Association for educational and certification needs. In 2012 he started the Medical Robotics and Devices Lab at the University of Minnesota, Mechanical Engineering department where he is currently an Assistant Professor.
M. Ali Nasseri’s seminar has been rescheduled for Wednesday, May 11th at 12:00 pm in 320 Hackerman Hall.
Stochastic Models in Robotics
Presented by Gregory Chirikjian
Abstract
Many stochastic problems of interest in engineering involve random rigid-body motions. In this talk, a variety of stochastic phenomena that evolve on the group of rigid-body motions will be discussed. These include mobile robot path planning, and robot-arm inverse kinematics. These topics lead in to our current work on multi-robot team diagnosis and repair, information fusion, and self-replicating robots. Videos of the latter robots developed by undergraduate student researchers and high school students during summer internships will be shown. These toy models in turn have led us to a deep mathematical investigation. Namely, in order to quantify the robustness of such robots, measures of the degree of environmental uncertainty that they can handle need to be computed. The entropy of the set of all possible arrangements (or configurations) of spare parts in the environment is such a measure, and has led us to study problems at the foundations of statistical mechanics and information theory.
Bio
Gregory S. Chirikjian received undergraduate degrees from Johns Hopkins University in 1988, and the Ph.D. degree from the California Institute of Technology, Pasadena, in 1992. Since 1992, he has been on the faculty of the Department of Mechanical Engineering, Johns Hopkins University, where he has been a full professor since 2001. From 2004-2007 he served as department chair. His research interests include robotics, applications of group theory in a variety of engineering disciplines, and the mechanics of biological macromolecules. He is a 1993 National Science Foundation Young Investigator, a 1994 Presidential Faculty Fellow, and a 1996 recipient of the ASME Pi Tau Sigma Gold Medal. In 2008 he became a Fellow of the ASME, and in 2010 he became a Fellow of the IEEE. He is the author of more than 200 journal and conference papers and primary author on three books: Engineering Applications of Noncommutative Harmonic Analysis (2001) and Stochastic Models, Information Theory, and Lie Groups, Vols. 1+2. (2009,2011)
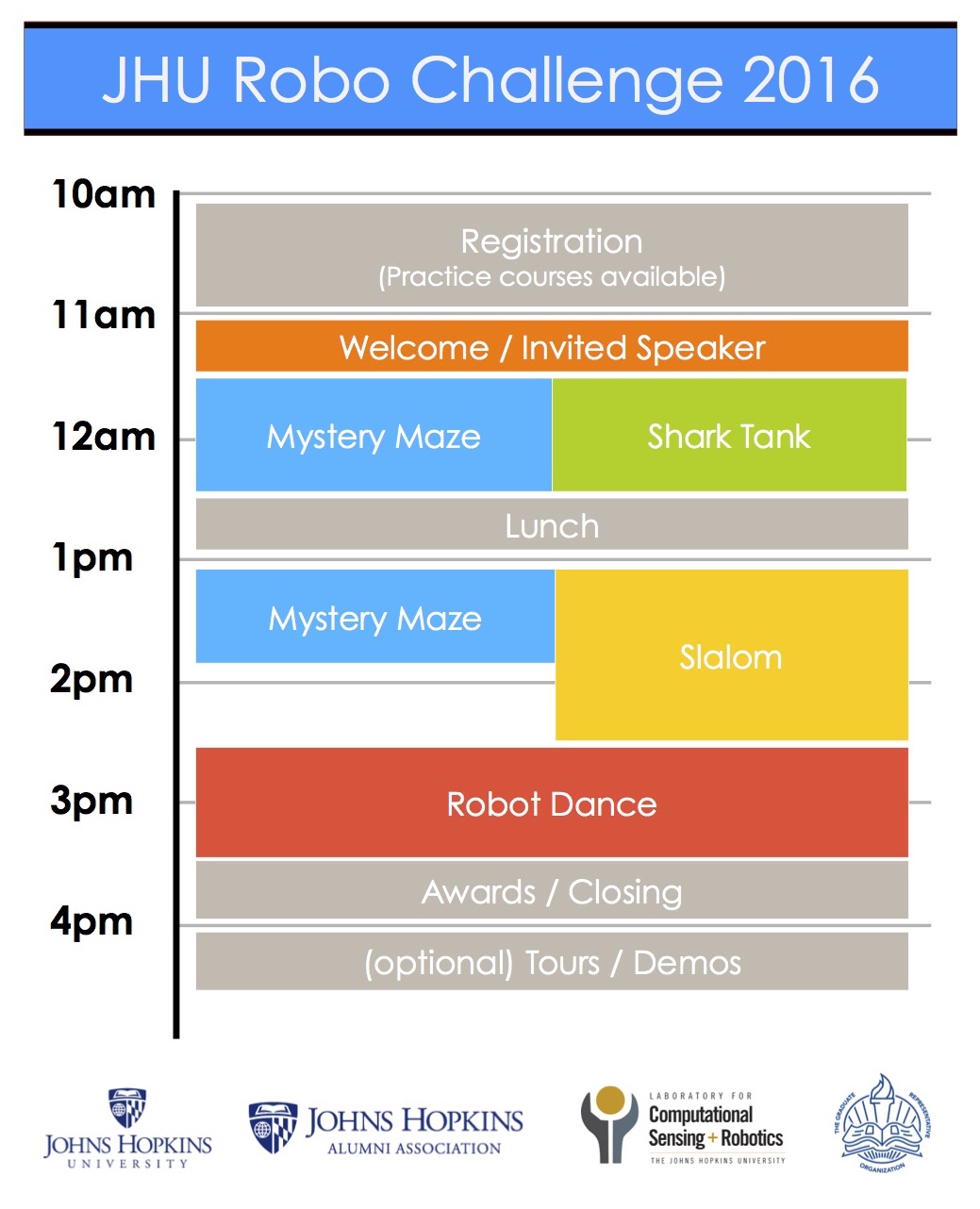
The purpose of the Johns Hopkins Robo Challenge is to complement classroom instruction by providing students with a unique opportunity to apply classroom skills and knowledge in a fun and competitive environment. The event brings students in teams to construct and program small robots that compete in several challenges.This competition is free and open to all middle and high school students.
For more information visit https://robochallenge.lcsr.jhu.edu/
Abstract
This is the Fall 2016 Kick-Off Seminar, presenting an overview of LCSR, useful information, and an introduction to the faculty and labs.
Abstract
While robots at the human size scale are generally composed of structures that are moved by a small set of actuators that shift materials or components with a well-defined shape, other principles for designing moving structures can control movement at the micron scale. For example, cells can move by disassembling parts of their rigid skeleton, or cytoskeleton, and reassembling new components in a different location. The structures that are disassembled and reassembled are often filaments that grow, shrink and form junctions between one another. Networks of rigid filaments serve as a cheap, reusable, movable scaffold that shapes and reshapes the cell.
Could we design synthetic materials to perform tasks of engineering interest at the micron scale? I’ll describe how we are using ideas from DNA nanotechnology to build synthetic filaments and how we can program where and when filaments assemble and disassemble and how they organize. We are able to use quantitative control over microscopic parameters, modeling and automated analysis to build increasingly sophisticated structures that can find, connect and move locations in the environment, form architectures and heal when damaged.
Abstract
Bio
Bernhard Fuerst is a research engineer at the Engineering Research Center at Johns Hopkins University. He received his Bachelor’s degree in Biomedical Computer Science at the University for Medical Technology in Austria in 2009 and his Master’s degree in Biomedical Computing at the Technical University in Munich, Germany in 2011. During his studies he joined Siemens Corporate Research in Princeton to research biomechanical simulations for compensation of respiratory motion under Dr. Ali Kamen’s supervision, and Georgetown University to investigate techniques for meta-optimization using particle swarm optimizers under Dr. Kevin Cleary’s supervision. Since joining the Johns Hopkins University, he worked on establishing Dr. Nassir Navab’s research group to focus on robotic ultrasound, minimally invasive nuclear imaging, and bioelectric localization and navigation.
Dr. David L. Akin
Director, Space Systems Laboratory
Associate Professor of Aerospace Engineering
University of Maryland
Abstract
For decades, the Space Systems Laboratory at the University of Maryland has been involved with advancing the capabilities of dexterous robotic systems to facilitate operations in challenging environments such as space and deep ocean. This work has been focused on developing integrated systems for these “extreme” environments, usually involving both mobility and dexterous manipulation. The talk will focus on the design, development, and operation of robotic systems developed in the SSL, including the Ranger Dexterous Servicing System (originally intended as a Space Shuttle flight experiment), SAMURAI (a 6000-meter deep ocean autonomous sampling system), an exoskeleton system for shoulder rehabilitation, and various rovers and robot arms.
Bio
David L. Akin is an Associate Professor in the Department of Aerospace Engineering and Director of the Space Systems Laboratory at the University of Maryland. He earned SB (1974), SM (1975), and ScD (1981) degrees from M.I.T. His current research focuses on space operations, including dexterous robotics, pressure suit design, and human-robot interactions. He is also active in the areas of spacecraft design, space simulation, and space systems analysis. He has been principal investigator for several space flight systems, and for multiple experimental space suit and robotic systems. He has over 100 professional publications in journals and conference proceedings.
Abstract
Contrary to popular notions, insects have sophisticated brains that allow them to adjust control so that behaviors are consistent with current internal and external conditions. The Central Complex (CX) is a set of midline neuropils in the brains of all arthropods. It is made up of the columnar structures including the protocerebral bridge, fan-shaped body and ellipsoid body. Neurons in these structures project to the paired nodules and lateral accessory lobes where they have access to descending interneurons that alter movements.
Over the past couple of decades, the CX has received a remarkable amount of attention by insect neurobiologists. We now know that several types of sensory information projects to the CX including mechanical information from the antennae and various visual cues including polarized light. Polarized light is used by several migratory insects to guide their long distance flights. We also know that activity in the CX precedes changes in movement and stimulation in the same regions can evoke turning behavior. Recently, navigation cues such as head direction compass cells have been identified in several insects.
Cockroaches are scavengers that forage through darkened environments. Like many foraging insects, they must keep track of targets while negotiating barriers. Thus, they need to simultaneously integrate sensory information and produce appropriate motor commands. As cockroaches move toward a darkened shelter they continually asses their situation and decide to either continue or turn based on whether they still see the shelter (Daltorio et al., 2013). This foraging behavior requires that the insect know its orientation and the direction of recent turns. It must then use that information to influence descending commands that result in turning behaviors. By performing tetrode recordings in a restrained preparation, we found CX neurons that encode the animal’s orientation using external and internal sensory cues, similarly to mammalian head direction cells as well as the direction of recent rotations (Varga and Ritzmann, 2016). How can this information influence movement in the arena? We recorded from tethered and freely walking cockroaches and found CX neurons in which activity increased just prior to changes in direction or speed (Martin et al., 2015). The patterns of movement coded in each CX neuron represents a population code that covers the entire range of horizontal movements that cockroaches make in the arena. Moreover, stimulation through the same tetrodes evoked movements consistent with the recorded activity. For individuals that consistently evoked turning in a particular direction, we further examined leg reflexes associated with the femoral chordotonal organ (FCo), which evokes reflex changes in the motor neurons that control the femur-tibia joint as well as the adjacent coxa-trochanter joint. Lesion of all descending activity causes a reversal in the FCo reflex to the slow depressor neuron (Ds) of the coxa-trochanter joint, which is consistent with changes associated with turning. Together these studies demonstrated that the cockroach CX relies upon a variety of sensory modalities to encode the animal’s orientation, which is then used to generate directionally specific motor commands, and therefore, direct locomotion.
More recently, we have turned to an insect predator to expand our understanding of how brain systems alter behavior. Predators must track down and accurately strike prey. Many change their strategy for obtaining food as they become satiated. We have been able to tap into CX activity during this process and have begun to examine how neuromodulators associated with satiety alter CX activity and related stalking behavior.
Bio
Roy E. Ritzmann is a Professor in the Department of Biology at Case Western Reserve University in Cleveland, Ohio. He received the B.A. degree in Zoology from the University of Iowa, the Ph.D. in Biology from the University of Virginia then moved to a postdoctoral position at Cornell University where he began working with insects on the neural circuitry underlying escape systems. His laboratory focuses on behavioral and neural properties that are involved in insect movement around barriers in complex terrain most recently focusing upon context and state dependent control in an insect brain region called the central complex (a group of neuropils that reside on the midline of virtually all arthropod brains). To that end they employ both extracellular (multi-channel) and intracellular recording techniques in the brain and thoracic ganglia of cockroaches and praying mantises. Using these techniques the Ritzmann laboratory has made progress in understanding how the central complex integrates massive amounts of information on the insect’s surroundings and internal state into descending commands that adjust movements toward goals and away from threats in a context dependent fashion. The Ritzmann laboratory has also collaborated on many biologically inspired robotic projects.