Calendar
Abstract
The human body is capable of dexterous manipulation in many different environments. Some environments, however, are challenging to access because of distance, scale, and limitations of the body itself. In many of these situations, access can be effectively restored via a telerobot, in which a human remotely controls a robot to perform the task. Dexterous manipulation through a telerobot is currently limited, and will be possible only if the interface between the operator’s body and the telerobot is able to accurately relay any sensory feedback resulting from the telerobot’s interactions in the environment.
This talk will focus on the scientific investigation of high fidelity haptic interfaces that adequately translate the interactions between the telerobot and its environment to the operator’s body through the sense of touch. I will introduce the theme of “Smart Haptic Displays,” which are capable of modulating their own dynamic properties to compensate for the dynamics of the body and the telerobot to ensure the environment dynamics are accurately presented to the operator. Along the way, I will highlight contributions I have already made for two specific telerobots: upper-limb prostheses and minimally invasive surgical robots. These contributions include an empirical validation of the utility of force feedback in body-powered prostheses and the creation of a testbed to compare various haptic displays for pinching palpation in robotic surgery. Finally, I will briefly introduce a novel approach I am currently investigating that utilizes haptic signals to automatically predict a surgical trainee’s skill on a minimally invasive surgical robotic platform. As this work progresses, it will lead to the creation of interfaces that provide the rich haptic sensations the body has come to expect, and will allow for dexterous manipulation in any environment whether or not access is mediated through a telerobot.
Bio
Jeremy D. Brown is a Postdoctoral Research Fellow in the Department of Mechanical Engineering and Applied Mechanics and the Haptics Group in the GRASP Lab at the University of Pennsylvania. He earned undergraduate degrees in applied physics and mechanical engineering from Morehouse College and the University of Michigan, and a PhD degree in mechanical engineering from the University of Michigan, where he worked in the HaptiX Laboratory. His research focuses on the interface between humans and robots with a specific focus on medical applications and haptic feedback. He was honored to receive several awards including the National Science Foundation (NSF) Graduate Research Fellowship and the Penn Postdoctoral Fellowship for Academic Diversity.
Abstract
Many robots today are confined to operate in relatively simple, controlled environments. One reason for this is that current methods for processing visual data tend to break down when faced with occlusions, viewpoint changes, poor lighting, and other challenging but common situations that occur when robots are placed in the real world. I will show that we can train robots to handle these variations by modeling the causes behind visual appearance changes. If we model how the world changes over time, we can be robust to the types of changes that objects often undergo. I demonstrate this idea in the context of autonomous driving, and I show how we can use this idea to improve performance on three different tasks: velocity estimation, segmentation, and tracking with neural networks. By modeling the causes of appearance changes over time, we can make our methods more robust to a variety of challenging situations that commonly occur in the real-world, thus enabling robots to come out of the factory and into our lives.
Bio
David Held is a Post-doctoral Researcher at U.C. Berkeley working with Pieter Abbeel. He recently completed his Ph.D. in Computer Science at Stanford, doing research at the intersection of robotics, computer vision, and machine learning. His Ph.D. was co-advised by Sebastian Thrun and Silvio Savarese. David has also interned at Google, working on the self-driving car project. Before Stanford, he worked as a software developer for a startup company and was a researcher at the Weizmann Institute, working on building a robotic octopus. He received a B.S. in Mechanical Engineering at MIT in 2005, an M.S. in Mechanical Engineering at MIT 2007, and an M.S. in Computer Science at Stanford in 2012, for which he was awarded the Best Master’s Thesis Award from the Computer Science Department.
Abstract
The big data revolution has profoundly changed, among many other things, how we perceive business, research, and application. However, in order to fully realize the potential of big data, certain computational and statistical challenges need to be addressed. In this talk, I will present my research in facilitating the deployment of machine learning methodologies and algorithms in big data applications. I will first present robust methods that are capable of accounting for uncertain or abnormal observations. Then I will present a generic regularization scheme that automatically extracts compact and informative representations from heterogeneous, multi-modal, multi-array, time-series, and structured data. Next, I will discuss two gradient algorithms that are computationally very efficient for our regularization scheme, and I will mention their theoretical convergence properties and computational requirements. Finally, I will present a distributed machine learning framework that allows us to process extremely large-scale datasets and models. I conclude my talk by sharing some future directions that I am and will be pursuing.
Bio
Yaoliang Yu is currently a research scientist affiliated with the center for machine learning and health, and the machine learning department of Carnegie Mellon University. He obtained his PhD (under Dale Schuurmans and Csaba Szepesvari) in computing science from University of Alberta (Canada, 2013), and he received the PhD Dissertation Award from the Canadian Artificial Intelligence Association in 2015.
Abstract
Microsurgery ranks among the most challenging areas of surgical practice, requiring the manipulation of extremely delicate tissues by various micron scale maneuvers and the application of very small forces. Vitreoretinal surgery, as the most technically demanding field of ophthalmic surgery, treats disorders of the retina, vitreous body, and macula, such as retinal detachment, diabetic retinopathy, macular hole, and epiretinal membrane. Recent advancements in medical robotics have significant potential to address most of the challenges in vitreoretinal practice, and therefore to prevent traumas, lessen complications, minimize intra-operative surgeon effort, maximize surgeon comfort, and promote patient safety. In this talk, I will present the development of novel force-sensing tools and robot control methods to produce integrated assistive surgical systems that work in partnership with surgeons against the current limitations in microsurgery, specifically focusing on membrane peeling and vein cannulation tasks in retinal microsurgery. Integrating high sensitivity force sensing into the ophthalmic instruments enables precise quantitative monitoring of applied forces. Auditory feedback based upon the measured forces can inform (and warn) the surgeon quickly during the surgery and help prevent injury due to excessive forces. Using these tools on a robotic platform can attenuate hand tremor of the surgeon, which effectively promotes tool manipulation accuracy. In addition, based upon certain force signatures, the robotic system can actively guide the tool towards clinical targets, compensate any involuntary motion of the surgeon, or generate additional motion that will make the surgical task easier. I will present our latest experimental results for two distinct robotic platforms, the Steady Hand Robot and Micron, with the force-sensing ophthalmic instruments, which show significant performance improvement in artificial dry phantoms and ex-vivo biological tissues.
Bio
Berk Gonenc is a Ph.D. candidate in Mechanical Engineering at Johns Hopkins University. He received his M.S. degree in Mechanical Engineering from Washington State University Vancouver in 2011 and joined the Advanced Medical Instrumentation and Robotics Research Laboratory in Johns Hopkins University. He received his M.S.E. degree in Mechanical Engineering from Johns Hopkins University in 2014. His research is focused on developing smart instruments and robot systems for microsurgery.
Abstract
In this talk, I will give a perspective on past and current trends in medical imaging particularly regarding the role of imaging in personalized medicine. I will then outline core technologies enabling the advancements, with specific focus on empirical and mechanistic modeling. In addition, I demonstrate some example clinical applications on how mechanistic and empirical models derived based on imaging are used for treatment planning and therapy outcome analysis. I conclude by providing a future outlook for the utilization of imaging in the healthcare continuum.
Abstract
Flying robots can operate in three-dimensional, indoor and outdoor environments. However, many challenges arise as we scale down the size of the robot, which is necessary for operating in cluttered environments. I will describe recent work in developing small, autonomous robots, and the design and algorithmic challenges in the areas of (a) control and planning, (b) state estimation and mapping, and (c) coordinating large teams of robots. I will also discuss applications to search and rescue, first response and precision farming. Publications and videos are available at kumarrobotics.org.
Bio
DR. VIJAY KUMAR is the Nemirovsky Family Dean of Penn Engineering with appointments in the Departments of Mechanical Engineering and Applied Mechanics, Computer and Information Science, and Electrical and Systems Engineering at the University of Pennsylvania. Dr. Kumar received his Bachelor of Technology degree from the Indian Institute of Technology, Kanpur and his Ph.D. from The Ohio State University in 1987. He has been on the Faculty in the Department of Mechanical Engineering and Applied Mechanics with a secondary appointment in the Department of Computer and Information Science at the University of Pennsylvania since 1987.
Dr. Kumar served as the Deputy Dean for Research in the School of Engineering and Applied Science from 2000-2004. He directed the GRASP Laboratory,
a multidisciplinary robotics and perception laboratory, from 1998-2004. He was the Chairman of the Department of Mechanical Engineering and Applied Mechanics from 2005-2008. He served as the Deputy Dean for Education in the School of Engineering and Applied Science from 2008-2012. He then served as the assistant director of robotics and cyber physical systems at the White House Office of Science and Technology Policy (2012 – 2013).
Dr. Kumar is a Fellow of the American Society of Mechanical Engineers (2003), a Fellow of the Institution of Electrical and Electronic Engineers (2005) and a member of the National Academy of Engineering (2013). Dr. Kumar’s research interests are in robotics, specifically multi-robot systems, and micro aerial vehicles. He has served on the editorial boards of the IEEE Transactions on Robotics and Automation, IEEE Transactions on Automation Science and Engineering, ASME Journal of Mechanical Design, the ASME Journal of Mechanisms and Robotics and the Springer Tract in Advanced Robotics (STAR).
For More Information or to RSVP please contact Deana Santoni at dsantoni@jhu.edu.
Sponsored by the Department of Mechanical Engineering and the JHU Student Section and the Baltimore Section of the American Society of Mechanical Engineers.
Abstract
For over a decade surgical educators have called for objective, quantitative methods to measure surgical skill. To date, no satisfactory method exists that is simultaneously accurate, scalable, and generalizable. That is, a method whose scores correlate with patient outcomes, can scale to cope with 51 million annual surgeries in the United States, and generalize across the diversity surgical procedures or specialties. This talk will review the promising results of exploiting crowdsourcing techniques to meet this need. The talk will also survey the limitations of this approach, fundamental problems in establishing ground truth for surgical skill evaluation, and steps to exploit surgical robotics data. The talk will conclude by proposing some future robotic approaches that may obviate the need for surgeons to master complex technical skills in the first place.
Bio
Dr. Kowalewski completed his PhD in electrical engineering for “quantitative surgical skill evaluation” at the University of Washington’s Biorobotics lab. This work was recognized with a best doctoral candidate award at the American College of Surgeons AEI Consortium on Surgical Robotics and Simulation. He was also a research scientist at DARPA’s “Traumapod: Operating room of the future” project. He has helped commercialize his PhD work for quantitative skill evaluation hardware (Simulab Corp., Seattle, WA) and also pioneered the use of crowdsourcing for highvolume assessment of surgical skills and cofounded CSATS Inc, Seattle, WA to make these methods available to modern healthcare. This work has been published in JAMA Surgery and formally adopted by the American Urological Association for educational and certification needs. In 2012 he started the Medical Robotics and Devices Lab at the University of Minnesota, Mechanical Engineering department where he is currently an Assistant Professor.
M. Ali Nasseri’s seminar has been rescheduled for Wednesday, May 11th at 12:00 pm in 320 Hackerman Hall.
Stochastic Models in Robotics
Presented by Gregory Chirikjian
Abstract
Many stochastic problems of interest in engineering involve random rigid-body motions. In this talk, a variety of stochastic phenomena that evolve on the group of rigid-body motions will be discussed. These include mobile robot path planning, and robot-arm inverse kinematics. These topics lead in to our current work on multi-robot team diagnosis and repair, information fusion, and self-replicating robots. Videos of the latter robots developed by undergraduate student researchers and high school students during summer internships will be shown. These toy models in turn have led us to a deep mathematical investigation. Namely, in order to quantify the robustness of such robots, measures of the degree of environmental uncertainty that they can handle need to be computed. The entropy of the set of all possible arrangements (or configurations) of spare parts in the environment is such a measure, and has led us to study problems at the foundations of statistical mechanics and information theory.
Bio
Gregory S. Chirikjian received undergraduate degrees from Johns Hopkins University in 1988, and the Ph.D. degree from the California Institute of Technology, Pasadena, in 1992. Since 1992, he has been on the faculty of the Department of Mechanical Engineering, Johns Hopkins University, where he has been a full professor since 2001. From 2004-2007 he served as department chair. His research interests include robotics, applications of group theory in a variety of engineering disciplines, and the mechanics of biological macromolecules. He is a 1993 National Science Foundation Young Investigator, a 1994 Presidential Faculty Fellow, and a 1996 recipient of the ASME Pi Tau Sigma Gold Medal. In 2008 he became a Fellow of the ASME, and in 2010 he became a Fellow of the IEEE. He is the author of more than 200 journal and conference papers and primary author on three books: Engineering Applications of Noncommutative Harmonic Analysis (2001) and Stochastic Models, Information Theory, and Lie Groups, Vols. 1+2. (2009,2011)
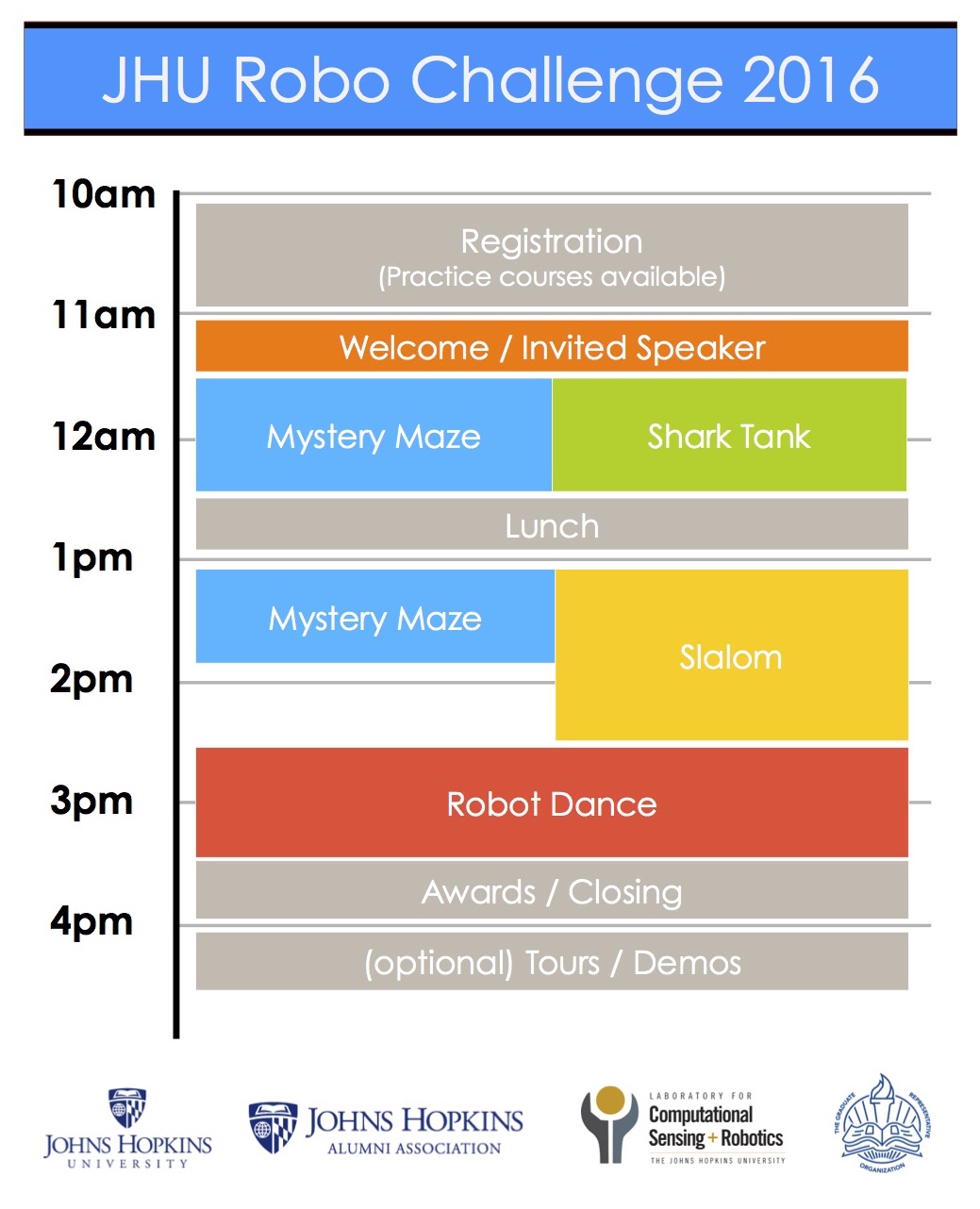
The purpose of the Johns Hopkins Robo Challenge is to complement classroom instruction by providing students with a unique opportunity to apply classroom skills and knowledge in a fun and competitive environment. The event brings students in teams to construct and program small robots that compete in several challenges.This competition is free and open to all middle and high school students.
For more information visit https://robochallenge.lcsr.jhu.edu/