Bell Studies Robot-Assisted Imaging to Improve Patient Care
LCSR’s Muyinatu A. Lediju Bell, assistant professor in the Department of Electrical and Computer Engineering with a joint appointment in the Department of Biomedical Engineering, develops theories, models, and simulations and performs experiments, all with the unified goal of improving ultrasonic and photoacoustic image quality so that patients receive better quality care.
Bell is the director of the Photoacoustic and 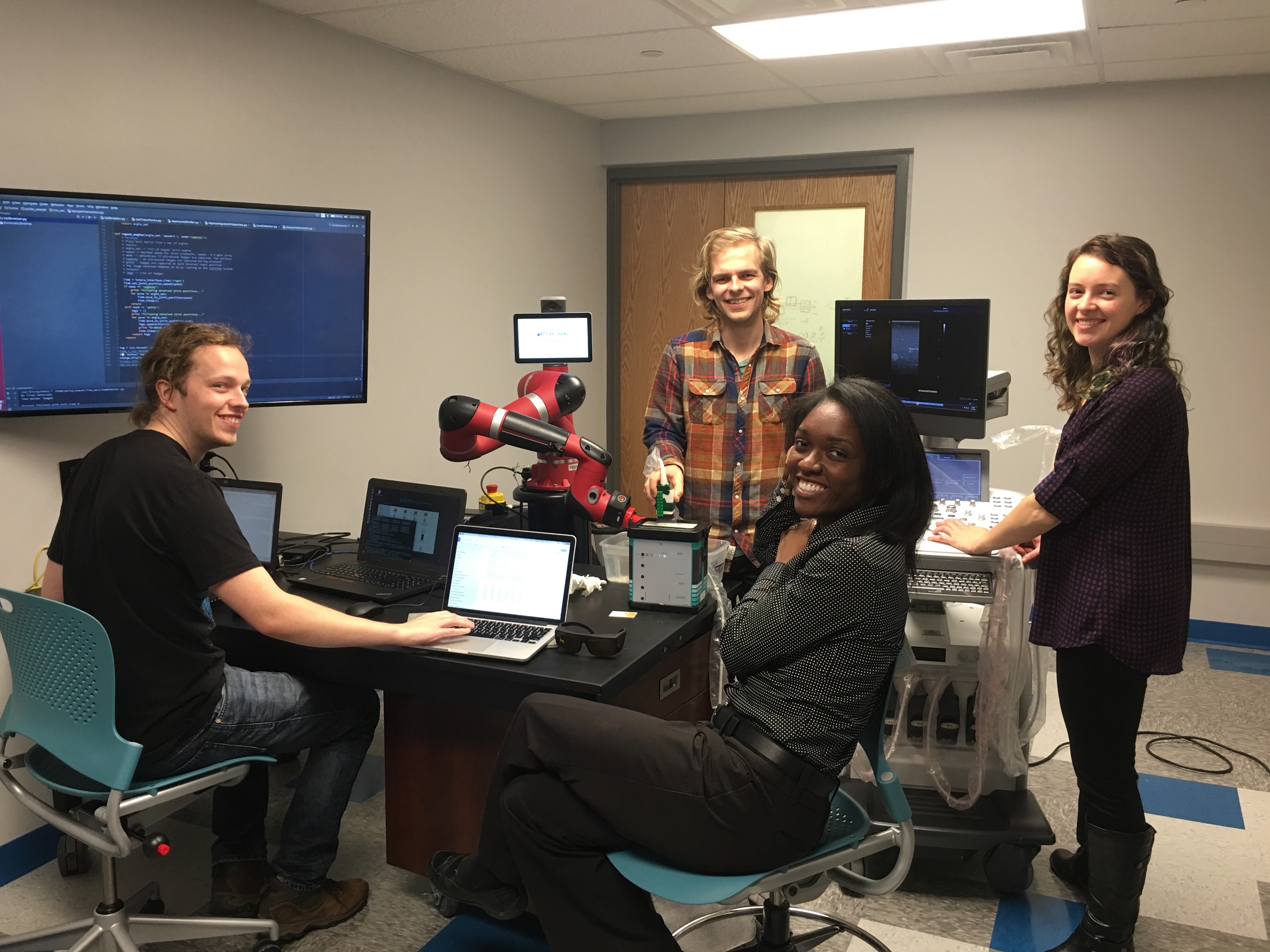 Ultrasonic Systems Engineering (PULSE) lab, which explores diagnostic and surgical procedures with innovative signal processing imaging methods to detect diseases earlier. Her systems promise to improve operator maneuverability for more customizable procedures with applications in neurosurgical navigation, cardiovascular diseases, women’s health, and cancer detection and treatment.
Ultrasonic Systems Engineering (PULSE) lab, which explores diagnostic and surgical procedures with innovative signal processing imaging methods to detect diseases earlier. Her systems promise to improve operator maneuverability for more customizable procedures with applications in neurosurgical navigation, cardiovascular diseases, women’s health, and cancer detection and treatment.
“We use photoacoustic and ultrasound imaging systems to address unmet clinical needs. As an example, photoacoustic imaging is an excellent approach to avoid critical anatomy like blood vessels,” Bell said. Bell also studies whether photoacoustic imaging can be used (instead of x-rays) in guiding a surgical needle for procedures like biopsies.
Bell seeks ways to use robots to simplify these imaging tasks. For example, researchers in her lab are exploring how to train robots to place ultrasound probes in targeted areas of patients’ bodies, allowing clinicians optimal views. Her hope is that, eventually, this will become a completely autonomous procedure, with the robot knowing exactly where to place the probe to image a specific organ of interest, or follow a catheter or a needle.
 According to Bell, the use of autonomous robots allows the measurement of the same patient over a period of time to be standardized, enabling doctors to evaluate treatment effectiveness. This approach also would permit researchers to analyze how the trajectory of one patient’s condition and treatment plan matches the undesirable trajectory of other patients, allowing clinicians to alter treatment sooner for more positive outcomes. One direct example is to standardize ultrasound measurements of tissue elasticity, giving surgeons more information about how various masses within the body appear in the images.
According to Bell, the use of autonomous robots allows the measurement of the same patient over a period of time to be standardized, enabling doctors to evaluate treatment effectiveness. This approach also would permit researchers to analyze how the trajectory of one patient’s condition and treatment plan matches the undesirable trajectory of other patients, allowing clinicians to alter treatment sooner for more positive outcomes. One direct example is to standardize ultrasound measurements of tissue elasticity, giving surgeons more information about how various masses within the body appear in the images.
“This is particularly true, for example, if you’re imaging cancer or some stiff mass where the cancer is harder than its surroundings. It will show up very well because there’s a large difference in the mechanical properties of the tissue,” Bell said, whose lab recently launched a clinical study at Johns Hopkins Hospital aimed at improving breast cancer detection.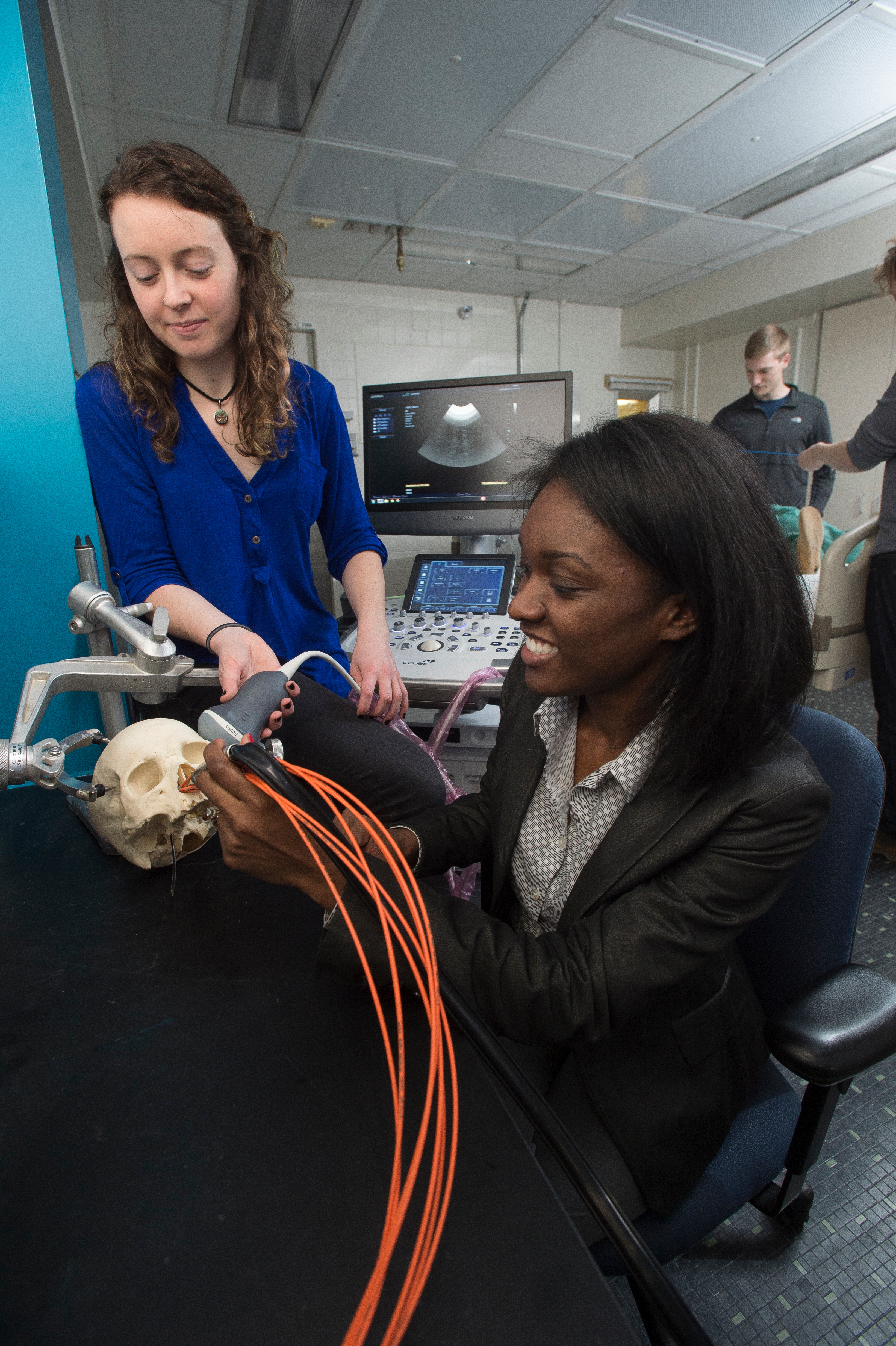
Most recently, Bell supervised an undergraduate student to explore the integration of photoacoustic imaging into the da Vinci surgical robot to navigate around blood vessels during hysterectomies.
Ten years from now, Bell hopes clinicians will be using and benefitting from the technology she is developing. She believes that her innovative photoacoustic imaging techniques will benefit any surgery in which there is a major blood vessel obscuring the path of the surgical procedure and can be implemented with any soft tissue organ surrounded by blood vessels, such as the liver, pancreas, and uterus, as well as more challenging environments that are surrounded by bone.
“It’s a rather challenging problem that we are addressing, in the sense that we want to see behind bone and other tissues, which can cause scattering, attenuation, and reflection of both sound and light. These optical and acoustic interactions severely degrade our image quality. While bone is most challenging, the complexity is scaled down in soft tissues, and we can therefore achieve similar tasks with the same technology being developed to work with bone,” Bell said.