Researchers from Johns Hopkins University’s Laboratory for Computational Sensing and Robotics, led by faculty member Joseph Moore, and a team of researchers from Johns Hopkins University’s Applied Physics Laboratory (APL) Intelligent Systems Center and the Army Research Laboratory (ARL), are advancing to the next phase of an ARL Collaborative Research Alliance aimed at enabling coordinated teams of robots to operate effectively in complex environments.
The project, titled Stratified Topological Autonomy for Long-range Coordination (STALC), employs a graph planning approach that allows teams of robotic agents to coordinate efficiently and avoid detection in complex environments, such as during rescue operations in hazardous conditions or reconnaissance missions in rocky or wooded terrain. The techniques they are developing can coordinate large teams of robots in seconds—fast enough to adapt to changing conditions—where existing methods would take minutes or struggle with larger teams. The project aims to minimize the whole team’s visibility while providing overwatch among teammates: some agents will locate and observe surveillants, while others will move between points of shelter along predetermined routes.
A key challenge the researchers face is that increased interactions among robots increase computational complexity, which can slow down processing, communication, and therefore action, jeopardizing the team and its mission. During the first phase of the project, researchers successfully developed algorithms to enable efficient coordination among multiple robots. To address computational lags, the researchers designed a mixed-integer optimization approach that allows for mission planning with potentially significant numbers of robotic agents.
Their method enables significantly faster processing compared to many state-of-the-art techniques and supports joint optimization, allowing the robotic agents to swiftly coordinate their actions toward a shared objective. Cora A. Duggan, a robotics researcher at APL and co-author on the study, notes that, “In dynamic environments, conditions can change quickly, and the robot team has to adapt just as fast. Common approaches explode in computational complexity for larger teams, but our approach overcomes that challenge and can generate complicated tactical plans in just seconds.” By the end of Phase I, the researchers demonstrated their algorithms in hardware by successfully coordinating multi-robot teams in both off-road forested and urban environments.
In Phase II, the researchers are building on this work to manage robot teams in more dynamic and uncertain environments. In these scenarios, the robot teams move rapidly in formation while also avoiding and predicting challenges, such as active surveillants and shifting terrain.
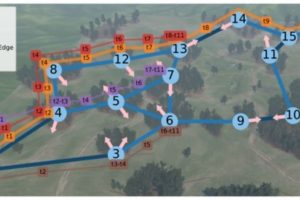
The STALC planner rapidly creates an aerial graph of the terrain that identifies areas that cannot be traversed and highlights features, such as zones of low visibility. The process defines nodes where robot team members might pause to observe without detection. The Mid-Level planner then assigns each team member a role and allocates routes based on the topological graph.
The STALC algorithms enable robot teams to anticipate the positions and movements of potential observers and obstacles. Some robotic agents monitor as others move to new positions, allowing the team to move in formation toward the desired point.
STALC effectively enhances the autonomy of individual agents, while ultimately empowering them to operate more successfully in tandem even as the environment changes. “Moving forward,” Moore says, “we want to explore how to combine our high-level mission planning with more rapid lower-level motion planning to enable more reactive and adaptive multi-robot teams.”