Calendar
Abstract:
In the first half the talk I will present image (MRI) guided robotic interventions. Robotic assistance for precise placement of needle like devices could improve the outcome of diagnostic or therapeutic interventions. Such interventions are often performed under image guidance; image guided robotic system can not only improve the tool placement accuracy but also eliminate the need for manual registration of the surgical scene in clinicians’ mind. This talk will cover recent advances and challenges of developing MRI guided robotic systems for percutaneous interventions. I will present development journey of an integrated robotic system for MRI-guided ablation of brain tumors. Also, I will briefly present MRI-guided robotic systems for prostate biopsy and shoulder arthrography. I will particularly focus on the clinical translation of these systems.
Second half of my talk will be about robot assisted vitreoretinal surgeries. Vitreoretinal surgeries are among the most challenging procedures demanding skills at the limit of human capabilities and requires precise manipulation of multiple surgical instruments in a constrained environment through the small opening on the white part of the eye, the sclera, with limited tool-tissue interaction perception. To alleviate some of these challenges, robotic assistance has been explored to provide steady and precise tool manipulation capabilities. However, in a cooperatively controlled robotic system, the stiff robotic structure removes the tactile perception between the surgeon’s hand holding the tool and sclera, which could result in injury to the sclera. In this part of the talk I will present recent advancements in robot control strategies to secure the sclera from any possible injury due to excessive forces and evaluation of Steady Hand Eye Robot in in vivo studies.
Bio:
Nirav A. Patel received his B.E in Computer Engineering from North Gujarat University in 2005, and M.Tech in Computer Science and Engineering from Nirma University in 2007. After completing M.Tech, he worked on industrial robots with ABB’s corporate research center in Bangalore till 2009. From 2009 to 2012, he worked as a faculty member, teaching at undergraduate and graduate levels. In 2012, he joined Robotics Engineering Ph.D program at Worcester Polytechnic Institute and received doctorate in 2017. Since 2017, he has been working as a postdoctoral fellow with Laboratory for Computational Sensing and Robotics (LCSR) at the Johns Hopkins University. His research interests include development of image guided robotic systems for percutaneous intervention, minimally invasive robotic surgeries and development of sensors and control strategies for safety in robot assisted minimally invasive surgeries. He is particularly interested in clinical translation of these technologies.
If you aren’t able to join us live or wanted to review the presentation, here is the link. It should be up at least through the end of the Spring semester. OneDrive Link
Abstract:
Many airplanes can, or nearly can, glide stably without control. So, it seems natural that the first successful powered flight followed from mastery of gliding. Many bicycles can, or nearly can, balance themselves when in motion. Bicycle design seems to have evolved to gain this feature. Also, we can make toys and ‘robots’ that, like a stable glider or coasting bicycle, stably walk without motors or control in a remarkably human-like way. Again, it seems to make sense to use `passive-dynamics’ as a core for developing the control of walking robots and to gain understanding of the control of walking people. That’s what I used to think. But, so far, this passive approach has not led to robust walking robots. What about human evolution? We didn’t evolve dynamic bodies and then learn to control them. Rather, people had elaborate control systems way back when we were fish and even worms. However: if control is paramount, why is it that uncontrolled passive-dynamic walkers walk so much like humans? It seems that energy optimal, yet robust, control, perhaps a proxy for evolutionary development, arrives at solutions that have some features in common with passive-dynamics. Instead of thinking of good powered walking as passive walking with a small amount of control added, I now think of good powered walking, human or robotic, as highly controlled, while optimized mostly for avoiding falls and, secondarily, for minimal actuator use. When well done, much of the motor effort, always at the ready, is usually titrated out. Thus, deceptively looking, “passive”.
Speaker:
Andy Ruina, Mechanical Engineering, Cornell University
My graduate education was mostly in solid mechanics. That morphed into biomechanics, dynamics and robotics. Recently, I am primarily interested in the mechanics of underactuated motion and locomotion
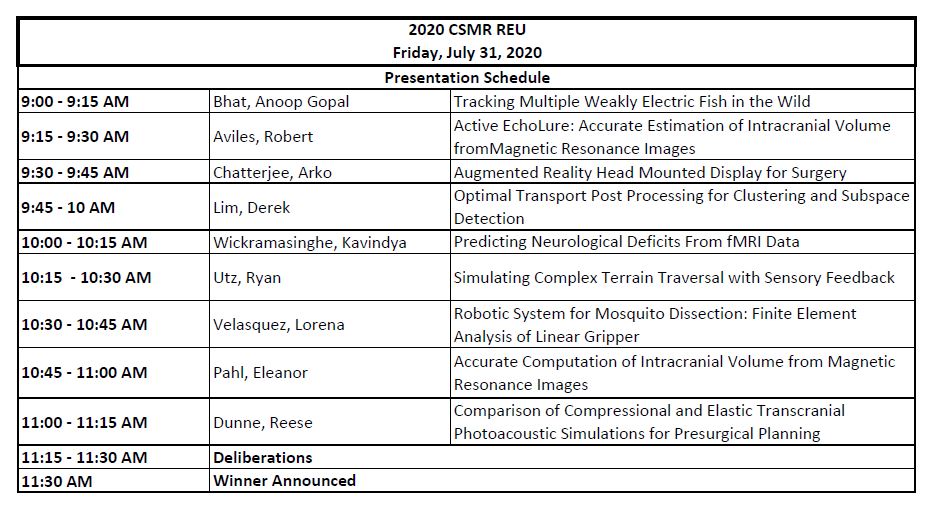
Please join us for the REU Closing Ceremony Presentations this Friday, July 31st, 9am-noon via Zooom https://wse.zoom.us/j/96982283136. Nine students from various institutions across the country have been working remotely with faculty mentors in the REU program this summer. The presentation schedule follows:
Link for Live Seminar
Link for Recorded seminars – 2020/2021 school year
Abstract:
This talk is an overview of our ongoing research in cataract surgery within the Language of Surgery project. Videos of the surgical field are a rich and easily accessible source of data on the extent and nature of care provided to patients in the operating room. This is a tremendous opportunity to demystify care in the surgical field, which is otherwise a black-box in many ways. Methods to analyze videos of the surgical field have multiple applications, one of which is a co-pilot for surgeons that supports their learning in the operating room throughout their career. Using cataract surgery as the prototype, this talk covers research to enable a learning platform that provides objective skill assessments and personalized feedback for surgeons.
Bio:
Swaroop Vedula is a medical doctor with surgical training and an epidemiologist, with post-doctoral training in computer science. He is a research faculty in the Malone Center for Engineering in Healthcare. Dr. Vedula’s research spans technology for objective skill assessment and personalized feedback for surgeons, surgical data science to analyze care in the operating room and its association with patient outcomes, robotic assistance for skill acquisition and surgical coaching, and explainable prediction models for clinical decision support.
Zoom Link for Seminar
Recorded seminars for the 2020/2021 school year
Abstract:
Human interaction with the physical world is increasingly mediated by automation — planes assist pilots, cars assist drivers, and robots assist surgeons. Such semi-autonomous machines will eventually pervade our world, doing dull and dirty work, assisting the elderly and disabled, and responding to disasters. Recent results (e.g. from the DARPA Robotics Challenge) demonstrate that, once a robot reaches a task area and grasps the necessary tool, handle, or wheel, they are able to plan and execute whole-body motions to accomplish complex goals. However, robots frequently lose their balance and fall en route to tasks, necessitating human supervision and intervention. Integrating legged machines in daily life will require safe and stable telelocomotion, that is, robot ambulation guided by humans. This talk presents our efforts to tackle the telelocomotion problem from the bottom-up and top-down, analyzing contact-rich robot dynamics to derive design principles for intrinsically-stable terradynamics, and leveraging the theory of human sensorimotor learning and control to design provably-safe interfaces for nonlinear control systems including legged robots.
Bio:
Sam Burden earned his BS with Honors in Electrical Engineering from the University of Washington in Seattle in 2008. He earned his PhD in Electrical Engineering and Computer Sciences from the University of California in Berkeley in 2014, where he subsequently spent one year as a Postdoctoral Scholar. In 2015, he returned to UW EE (now ECE) as an Assistant Professor; in 2016, he received a Young Investigator Program award from the Army Research Office (ARO-YIP). Sam is broadly interested in discovering and formalizing principles of sensorimotor control. Specifically, he focuses on applications in dynamic and dexterous robotics, neuromechanical motor control, and human-cyber-physical systems. In his spare time, he teaches robotics to students of all ages in classrooms and campus events.
Link for Live Seminar
Link for Recorded seminars – 2020/2021 school year
Peter A. Sheppard – Sr. Intellectual Property Manager Johns Hopkins Technology Ventures
“Intellectual Property Primer For Conflict of Interest Training.”
Laura M. Evans – Senior Policy Associate, Director, Homewood IRB
“Conflicts of Interest: Identification, Review, and Management.”
Link for Live Seminar
Link for Recorded seminars – 2020/2021 school year
Abstract: Despite 50 years of research, robots remain remarkably clumsy, limiting their reliability for warehouse order fulfillment, robot-assisted surgery, and home decluttering. The First Wave of grasping research is purely analytical, applying variations of screw theory to exact knowledge of pose, shape, and contact mechanics. The Second Wave is purely empirical: end-to-end hyperparametric function approximation (aka Deep Learning) based on human demonstrations or time-consuming self-exploration. A “New Wave” of research considers hybrid methods that combine analytic models with stochastic sampling and Deep Learning models. I’ll present this history with new results from our lab on grasping diverse and previously-unknown objects.
Bio: Ken Goldberg is the William S. Floyd Distinguished Chair in Engineering at UC Berkeley and an award-winning roboticist, filmmaker, artist and popular public speaker on AI and robotics. Ken trains the next generation of researchers and entrepreneurs in his research lab at UC Berkeley; he has published over 300 papers, 3 books, and holds 9 US Patents. Ken’s artwork has been featured in 70 art exhibits including the 2000 Whitney Biennial. He is a pioneer in technology and artistic visual expression, bridging the “two cultures” of art and science. With unique skills in communication and creative problem solving, invention, and thinking on the edge, Ken has presented over 600 invited lectures at events around the world.
Link for Live Seminar
Link for Recorded seminars – 2020/2021 school year
Abstract:
Robotic assisted surgery (RAS) systems, incorporate highly dexterous tools, hand tremor filtering, and motion scaling to enable a minimally invasive surgical approach, reducing collateral damage and patient recovery times. However, current state-of-the-art telerobotic surgery requires a surgeon operating every motion of the robot, resulting in long procedure times and inconsistent results. The advantages of autonomous robotic functionality have been demonstrated in applications outside of medicine, such as manufacturing and aviation. A limited form of autonomous RAS with pre-planned functionality was introduced in orthopedic procedures, radiotherapy, and cochlear implants. Efforts in automating soft tissue surgeries have been limited so far to elemental tasks such as knot tying, needle insertion, and executing predefined motions. The fundamental problems in soft tissue surgery include unpredictable shape changes, tissue deformations, and perception challenges.
My research goal is to transform current manual and teleoperated robotic soft tissue surgery to autonomous robotic surgery, improving patient outcomes by reducing the reliance on the operating surgeon, eliminating human errors, and increasing precision and speed. This presentation will introduce our Intelligent Medical Robotic Systems and Equipment (IMERSE) lab and discuss our novel strategies to overcome the challenges encountered in soft tissue autonomous surgery. Presentation topics will include: a) a robotic system for supervised autonomous laparoscopic anastomosis, b) magnetically steered robotic suturing, c) development of patient specific biodegradable nanofiber tissue-engineered vascular grafts to optimally repair congenital heart defects (CHD), and d) our work on COVID-19 mitigation in ICU robotics, safe testing, and safe intubation.
Bio: Axel Krieger, PhD, and his IMERSE team joined LCSR in July 2020. He is an Assistant Professor in the Department of Mechanical Engineering at the Johns Hopkins University. He is leading a team of students, scientists, and engineers in the research and development of robotic tools and laparoscopic devices. Projects include the development of a surgical robot called smart tissue autonomous robot (STAR) and the use of 3D printing for surgical planning and patient specific implants. Professor Krieger is an inventor of over twenty patents and patent applications. Licensees of his patents include medical device start-ups Activ Surgical and PeriCor as well as industry leaders such as Siemens, Philips, and Intuitive Surgical. Before joining the Johns Hopkins University, Professor Axel Krieger was Assistant Professor in Mechanical Engineering at the University of Maryland and Assistant Research Professor and Program Lead for Smart Tools at the Sheikh Zayed Institute for Pediatric Surgical Innovation at Children’s National. He has several years of experience in private industry at Sentinelle Medical Inc and Hologic Inc. His role within these organizations was Product Leader developing devices and software systems from concept to FDA approval and market introduction. Dr. Krieger completed his undergraduate and master’s degrees at the University of Karlsruhe in Germany and his doctorate at Johns Hopkins, where he pioneered an MRI guided prostate biopsy robot used in over 50 patient procedures at three hospitals.