Taylor Team Develops Galen Surgical Robot for Research and Clinical Use
 Russell Taylor, the John C. Malone Professor of Computer Science and director of the Laboratory for Computational Sensing and Robotics, is working to refine research and surgical applications of the Galen Surgical System, a robot used to reduce surgeon hand tremors and increase precision during head and neck microsurgery. Taylor also recently received a TEDCO Maryland Innovation Initiative grant to turn the robot into a more useable prototype for clinical practice use.
Russell Taylor, the John C. Malone Professor of Computer Science and director of the Laboratory for Computational Sensing and Robotics, is working to refine research and surgical applications of the Galen Surgical System, a robot used to reduce surgeon hand tremors and increase precision during head and neck microsurgery. Taylor also recently received a TEDCO Maryland Innovation Initiative grant to turn the robot into a more useable prototype for clinical practice use.
The Galen robot was created by a Hopkins PhD student, Kevin Olds, who worked with Taylor and is now a senior staff engineer at the Johns Hopkins School of Medicine.
Olds and Taylor based the Galen on technology developed for the Eye Surgical Assistant Workstation at JHU. The system is typically used in laryngeal/vocal cord surgeries, open microsurgeries, and in image-guided sinus surgeries, but it can also be used in otology and craniotomy, as well as spine and hand surgeries.
Taylor’s team created the Galen as an answer to the challenges faced by surgeons during minimally-invasive head and neck operations: hand tremor, visualization, and safety. Holding and manipulating long medical instruments (25cm) increases surgeons’ hand tremors and reduces precision. In addition, tight spaces near sensitive anatomy, delicate structures that might tear, and limited surgical work areas do not allow surgeons much flexibility. Surgeons also visualize the operating field through microscopes and endoscopes, limiting their view.
The beauty of the Galen is that it allows a surgeon to work with the robot. The surgeon guides the procedure, but the robot steadies the motion.
“The robot itself works like power-steering in a car,” Taylor says, “The surgeon and the robot both hold the surgical instrument, but the robot has a force sensor so the robot can detect forces that the surgeon is exerting on the handle of the tool and just follows the surgeon’s hand.”
According to Taylor, the robot can also enforce a safety barrier. Because a surgeon often must insert and remove tools many times during a surgical procedure, there is always the risk of hitting something and causing bleeding. Taylor’s team developed programming that allows a CT scan to provide the position and location of the robot’s surgical tools during the procedure. This process, called “surgical navigation,” allows the computer to know the coordinate system of both the robot and the CT, and to provide the surgeon with that important information.
What’s more, the Galen’s different control modes—free hand, remote center of motion, teleoperation, and virtual fixture avoidance—allow the surgeon to choose how much the robot guides the surgeon’s hand through a ‘safe path’ during surgery, Taylor says.
If contact with a certain area of the surgical site could cause harm – that location can be programmed as a ‘virtual fixture’ into the interface. As a result, the robot will ensure that the surgeon avoids that sensitive area.
Now that the pre-clinical system of the Galen surgical robot is complete, Taylor is working on a clinical version that will eventually be used by surgeons in medical center settings.
Taylor is collaborating with Bruce Lichorowic, President and CEO of Galen Robotics Inc., the California-based start-up company forme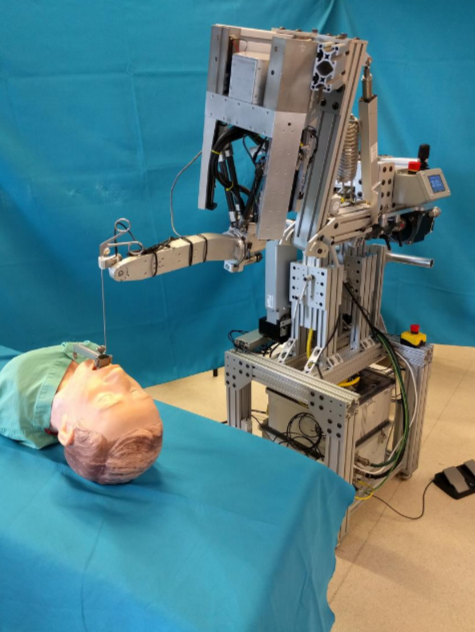 d to develop a clinical version of the system – a robot that could meet FDA requirements and actually be put to work in hospital operating rooms. Hopkins researchers and students are working with engineers from Galen Robotics to transition the Galen from a robotic device to a surgical system, as well as to integrate it into surgical workflows.
d to develop a clinical version of the system – a robot that could meet FDA requirements and actually be put to work in hospital operating rooms. Hopkins researchers and students are working with engineers from Galen Robotics to transition the Galen from a robotic device to a surgical system, as well as to integrate it into surgical workflows.
“This collaborative development is also terrific for the students. Students interacting with professional engineers learn so much,” says Taylor, who notes that a number of Hopkins graduate and undergraduate students have worked on the system’s research and development.
For instance, Yunus Sevimli, the lead research engineer on Galen project at Hopkins, graduated with his master’s degree in Mechanical Engineering in 2015. He remains at Hopkins as an assistant research engineer in the LCSR.
Molly O’Brien, a first year graduate student in Computer Science, is using microscope and endoscope video to evaluate reduction of hand-tremor in the system’s surgical application. And Paul Wilkening, another graduate student in Computer Science, is also actively involved in the project, jointly supervised by Taylor and Kazanzides. Wilkening works on both on the Galen robot project and space satellite repair project with the dVRK. His research focus is on virtual fixtures and control modes that allow the robot to share motion control with the surgeon.
Taylor notes that undergraduates are also involved in the project: Thomas Keady, a junior Electrical Engineering student, helps with the electrical interfaces of the robot. Mariah Schrum, a junior, and Joseph Peine, a senior (both in the Department of Mechanical Engineering) are working on the development of tool adapters and phantoms, which are ways of simulating a patient’s anatomy to help evaluate repeatable procedures.
Taylor says that his work will continue to explore further head and neck surgical applications to improve and expand the Galen’s technology. Researchers will take the clinical version of the basic ‘platform technology’ and find new ways to use the interfaces it provides to improve capabilities.
“In a future evolution of the Galen system, extended capabilities will potentially include ‘smart’ tools and navigation integration, video processing for microscopes and endoscopes, laser alignment and optical tracking, ultrasound and other imaging, and virtual fixtures, including dexterous and force sensing tools,” Taylor says.