Li Presents Highlight Paper at IROS 2016
Chen Li, assistant professor in the Department of Mechanical Engineering and principal investigator of the Terradynamics Lab, presented recent work at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in Daejeon, Korea, from October 9 to 14, 2016. The paper, entitled “Cockroach-inspired winged robot reveals principles of ground-based dynamic self-righting,” was selected as one of only 20 exceptional papers highlighted at the conference from more than 800 presentations. Li’s research analyzed the principles of quasi-static and dynamic self-righting in insects and applied these characteristics to the wings of their small-legged robots.
Li’s paper built on work he did in a previous study, which investigated how insects move through complex terrain such as grass and rocks. In that study, Li’s team found that while cockroaches could move very quickly through this environment by rolling their bodies sideways through the gaps, even the best small-legged robots got stuck when they encountered an obstacle, since they could only turn left or right on a horizontal plane. Why was the animal so much more adept than the robot in this environment?
In fluid dynamics and aerodynamics, moving bodies produce better results when their shapes are streamlined, allowing them to move more rapidly and efficiently through space. Li’s research group applied this concept to terradynamics, noticing that the shells of cockroaches (much like the shapes of birds and fish) are curved, presumably having less resistance when moving through air or water. They hypothesized that this rounded shape allowed the insects to roll their bodies more deftly through complex terrain. The lab was able to confirm this through animal experiments. Inspired by that observation, the researchers applied the same concept to robotics: the researchers gave their robot a more rounded shell similar to that of an insect. They found that the rounded shell shape allowed the robot – even one without any sensors – to better traverse the uneven environment.
Still there were problems. Though the robot could now handle traversing, it would sometimes over-roll, lose its balance, and flip over. When the insects flipped over, they could open their wings and push against the ground to flip themselves upright.
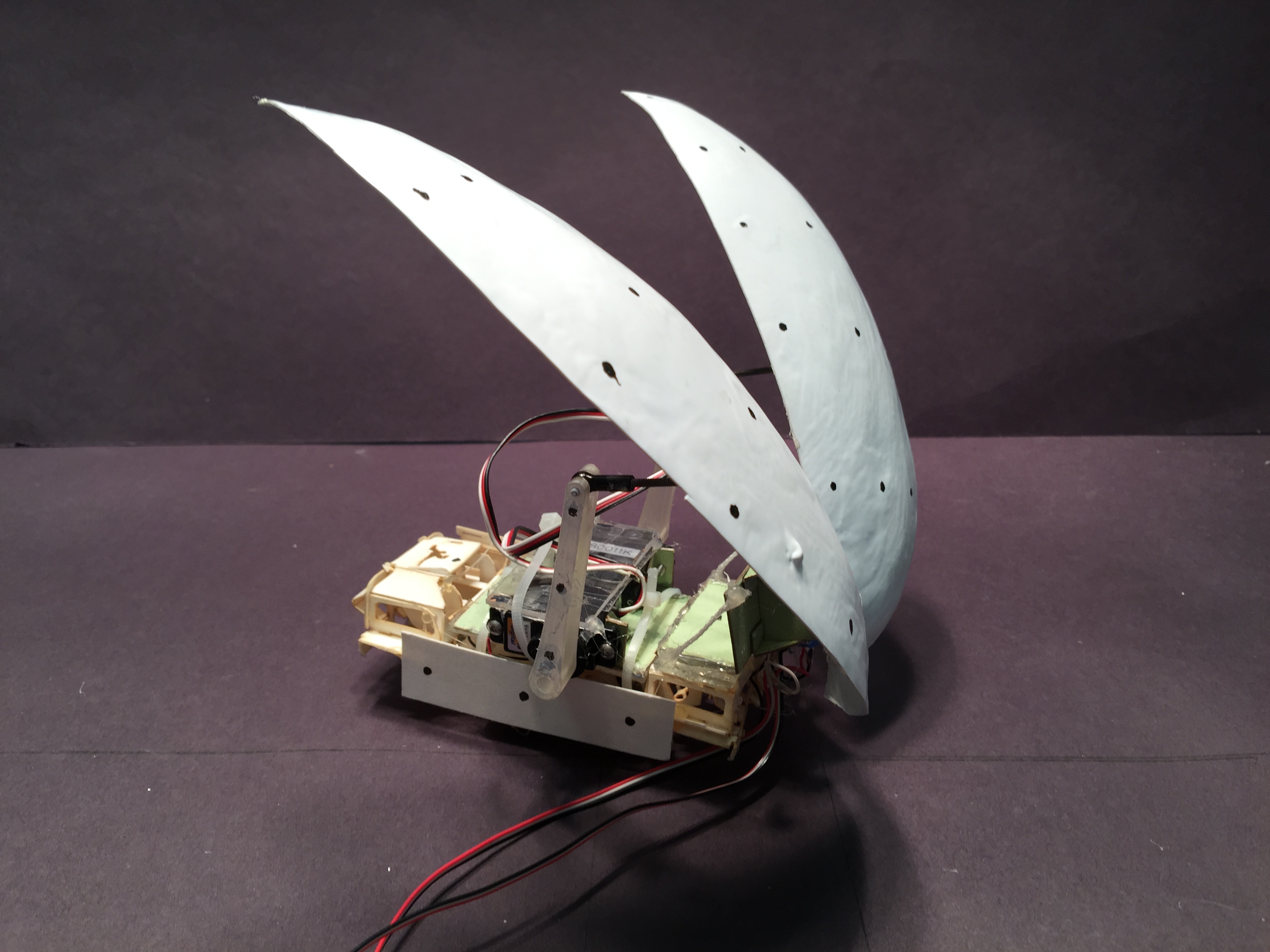
In his most rece nt study, Li and his team analyzed this self-righting problem in small-legged cockroach-inspired robots. They discovered that insect wings were multi-functional: for protection, obstacle traversal, and self-righting. The cockroaches were able to recover very quickly, using their rigid ellipsoidal wings to self-right themselves. Taking inspiration from nature, the researchers split the shell of the robot into two “wings” with separate motors that could open and close.
nt study, Li and his team analyzed this self-righting problem in small-legged cockroach-inspired robots. They discovered that insect wings were multi-functional: for protection, obstacle traversal, and self-righting. The cockroaches were able to recover very quickly, using their rigid ellipsoidal wings to self-right themselves. Taking inspiration from nature, the researchers split the shell of the robot into two “wings” with separate motors that could open and close.
The team used this model as a tool to further study the physics principles related to self-righting and how much the self-righting process depends on variation in the parameters of speed and magnitude of the wing opening. If the wings opened slowly or only opened a small amount, the robot would fail to right itself. But if the opening speed or opening angle was increased, then the robot could successfully right itself.
The researchers systematically varied the opening magnitude and opening speed to measure the probability of the success rate, and found that as magnitude and speed increased, performance became better.
Li also collaborated with Chad Kessens, a robotic manipulation researcher at the Army Research Lab, who had a geometric model that the Li team could use to generate many trials. Li and Kessens used this model to understand how shape and speed affected self-righting. The fact that there are many diverse insects with many differently shaped wings is allowing the researchers to further explore how wing shape and wing height affected dynamic self-righting.
They discovered there were two basic regimes of self-righting depending on wing shape and wing height: either “quasi-static,” in which the center of gravity moved out of the ground-contact region and the insect fell over to right itself, or it was “dynamic,” in which the insect’s wings pushed against the ground with enough force that it had sufficient kinetic energy to flip over. Both the cockroach and the robot had wing shape and wing height that fell in the ‘dynamic regime’ and thus used kinetic energy to self-right.
The team then used the robot to test their biological hypothesis of asymmetrical righting, in which the animal opens one wing slightly more than the other and both pitches and rolls its body to self-right, rather than with a symmetrical full pitch. But they wondered: Is the asymmetrical righting beneficial in some way?
Li tested this hypothesis by opening one robot wing more than the other. He was surprised to learn that
if both wings could open by small magnitudes, asymmetric righting actually had a higher probability of success than symmetric righting.
 Because a full pitch moves the center of gravity to a higher trajectory, symmetrical righting takes more energy to complete. Li’s team hypothesized that the insect’s switch from symmetric to asymmetric righting was due to the flexibility of its wings, as well as to its fatigue over time. It often takes an animal multiple attempts to eventually right itself; because asymmetrical righting could achieve success at higher probability, it would save the animal energy.
Because a full pitch moves the center of gravity to a higher trajectory, symmetrical righting takes more energy to complete. Li’s team hypothesized that the insect’s switch from symmetric to asymmetric righting was due to the flexibility of its wings, as well as to its fatigue over time. It often takes an animal multiple attempts to eventually right itself; because asymmetrical righting could achieve success at higher probability, it would save the animal energy.
Much of the research in robotics so far has been dedicated to avoiding obstacles by using sensors to map out the environment into a geometric layout of the world (e.g., Google self-driving cars). However, robots cannot always avoid obstacles and sometimes must overcome difficult terrain. Animals, on the other hand, use not only sensors, but also adapted body structure. Li’s research showed that robots can benefit greatly from using physics principles discovered by studying how an animal’s body and appendages are mechanically tuned to solve locomotor problems.
The Terradynamics Lab creates new physics models of locomotor-terrain interactions to understand animal traversal and improve robotic mobility in complex terrain common in the real world. This would help improve robotic multi-function locomotion over complex terrains, so that a robot can change the way it moves depending on the environment and overcome various obstacles. In the future, these robots may be used to traverse building rubble in wreckage sites to rescue victims or to roam over loose Martian soil.