Dr. Chen Li to Join Mechanical Engineering Faculty and Laboratory for Computational Sensing and Robotics in Winter 2015-2016
 The Department of Mechanical Engineering is pleased to welcome Dr. Chen Li who will join the Department of Mechanical Engineering and Laboratory for Computational Sensing and Robotics as Assistant Professor in Winter 2015-2016. Beginning this summer Dr. Li will hold interim appointment as Assistant Research Professor in ME while he completes his postdoctoral research at Berkeley.
The Department of Mechanical Engineering is pleased to welcome Dr. Chen Li who will join the Department of Mechanical Engineering and Laboratory for Computational Sensing and Robotics as Assistant Professor in Winter 2015-2016. Beginning this summer Dr. Li will hold interim appointment as Assistant Research Professor in ME while he completes his postdoctoral research at Berkeley.
Dr. Li completed his PhD at the School of Physics at Georgia Institute of Technology in 2011. Since 2012 Dr. Li has been a Miller Fellow at University of California, Berkeley in the Poly-PEDAL Lab and Biomimetic Millisystems Lab.
Dr. Li’s research aims to create terradynamics and advance understanding of animal locomotion and robotic mobility in the real world. Aero- and hydrodynamics help us understand how animals fly and swim in air and water and develop aerial and aquatic vehicles. During terrestrial locomotion, the complexity of interactions of animals and devices with real-world terrain often rivals or even exceeds that with fluids; however, the physics of these interactions is relatively unknown. Dr. Li’s long term research vision is to bridge this gap by creating terradynamics—analogous to aero- and hydrodynamics—to enable quantitative prediction of forces and movement in complex terrain. For example, Dr. Li’s research has resulted in creation of the first terradynamics of legged locomotion on granular media (Fig. 1), and discovery of terradynamic streamlining for locomotion in cluttered terrain (Fig. 2). Dr. Li was recently awarded a highly competitive Burroughs Wellcome Fund Career Award at the Scientific Interface to support his research on terradynamics.
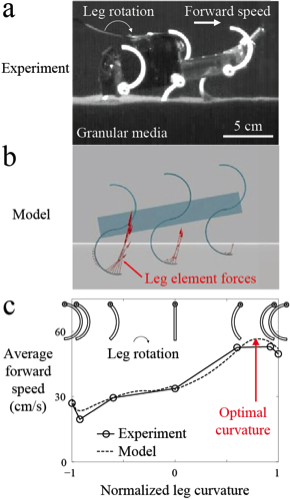
Fig. 1. Terradynamics predicts forces and movement during legged locomotion on granular media like sand. (a) A bio-inspired hexapedal robot running on granular media. (b) The robot’s ground reaction force is calculated by superposition of element forces over the body and legs using the resistive force model. (c) Model predicts the speed of the robot over a broad range of leg curvatures, and predicts the optimal leg curvature.
 Fig. 2. Terradynamic streamlining inspired from cockroaches enables legged robots to traverse densely cluttered obstacles. (Top) A discoid cockroach rolls its body to the side and quickly maneuvers through narrow gaps between densely cluttered, grass-like beam obstacles. (Bottom) Adding a rounded, ellipsoidal, exoskeletal shell enables a legged robot to traverse beam obstacles using roll maneuvers, without adding sensors or changing the open-loop control.
Fig. 2. Terradynamic streamlining inspired from cockroaches enables legged robots to traverse densely cluttered obstacles. (Top) A discoid cockroach rolls its body to the side and quickly maneuvers through narrow gaps between densely cluttered, grass-like beam obstacles. (Bottom) Adding a rounded, ellipsoidal, exoskeletal shell enables a legged robot to traverse beam obstacles using roll maneuvers, without adding sensors or changing the open-loop control.