Camera-augmented mobile C-Arm installed at LCSR
A Brief History
 Nassir Navab, a professor in the Department of Computer Science, and former colleagues Ali Bani-Hashemi and Matthias Mitschke invented the Camera-Augmented mobile C-arm in 1998 at Siemens Corporate Research in Princeton, New Jersey. The early concept and implementation were first presented at IEEE’s International Workshop on Augmented Reality in 1999 in San Francisco. Though the first system was built and tested on phantoms at Siemens Medical Solutions in Germany, research projects using this innovative system were also
Nassir Navab, a professor in the Department of Computer Science, and former colleagues Ali Bani-Hashemi and Matthias Mitschke invented the Camera-Augmented mobile C-arm in 1998 at Siemens Corporate Research in Princeton, New Jersey. The early concept and implementation were first presented at IEEE’s International Workshop on Augmented Reality in 1999 in San Francisco. Though the first system was built and tested on phantoms at Siemens Medical Solutions in Germany, research projects using this innovative system were also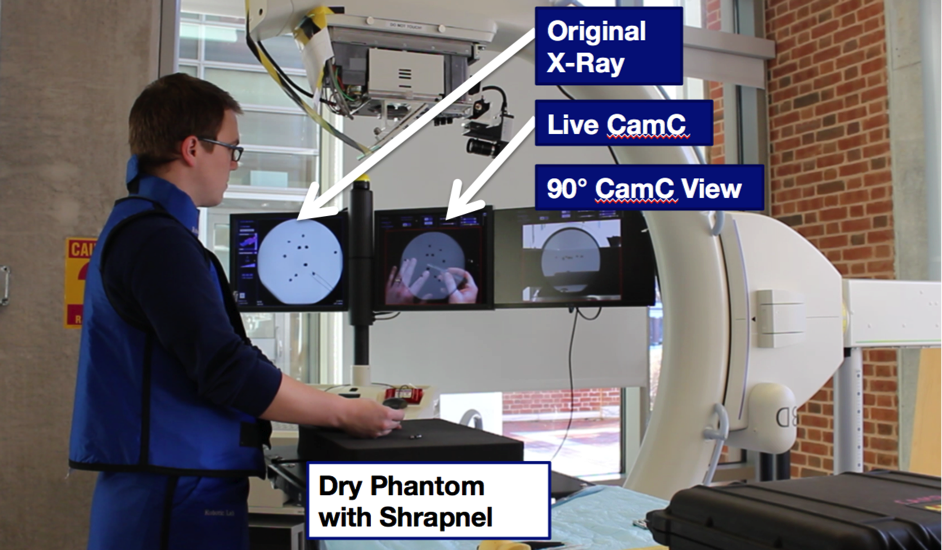 conducted in Munich, when Navab joined Technische Univerisität there in September 2003. This system allowed the development of many novel techniques, including the first parallax-free X-ray stitching, which was presented at the Medical Image Computing and Computer Assisted Intervention Society conference in 2009 and received the MICCAI Society Young Investigator Award that year. Later on, this system became one of the first augmented reality solutions to be introduced inside real operating rooms, and was used to improve the outcome for 40 patients undergoing orthopedics and trauma surgical procedures.
conducted in Munich, when Navab joined Technische Univerisität there in September 2003. This system allowed the development of many novel techniques, including the first parallax-free X-ray stitching, which was presented at the Medical Image Computing and Computer Assisted Intervention Society conference in 2009 and received the MICCAI Society Young Investigator Award that year. Later on, this system became one of the first augmented reality solutions to be introduced inside real operating rooms, and was used to improve the outcome for 40 patients undergoing orthopedics and trauma surgical procedures.
CAMC and Cone-Beam CT at LCSR
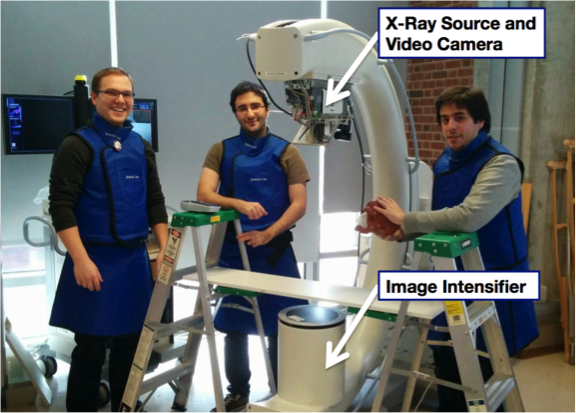
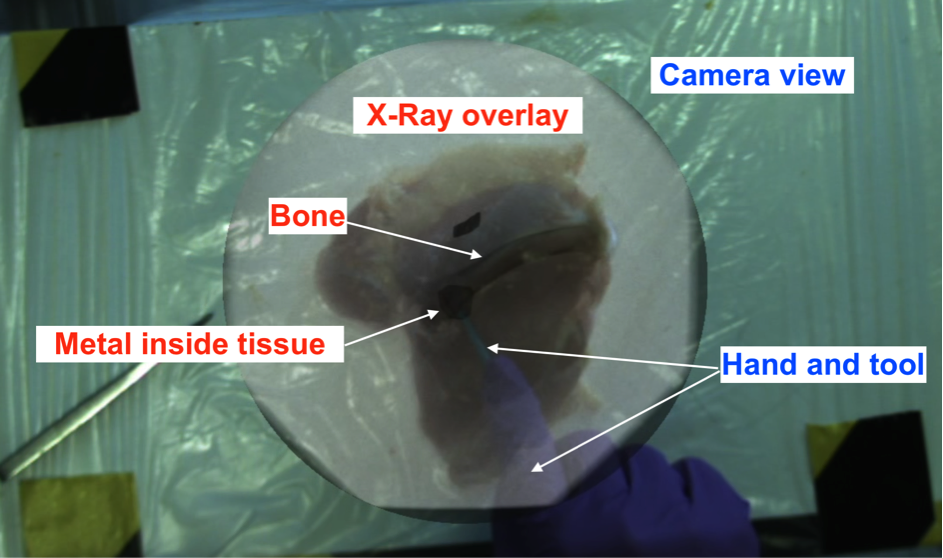 Thanks to a double mirror system and a onetime calibration during the construction of the system, Camera Augmented Mobile C-arm provides co-registered X-ray and optical images. This allows dramatic reduction of X-ray exposure as well as better hand-eye coordination during orthopedics and trauma interventions. In December 2014, a recent prototype version of this system running on a mobile C-arm with 3D reconstruction capability was installed at LCSR, allowing JHU researchers to collaborate with Hopkins surgeons to develop augmented reality solutions for orthopedics and vascular surgery applications. The system is now available also for professional and public demonstrations within the Mock-OR at LCSR. Furthermore, Johns Hopkins’s Homewood Institutional Review Board has approved the evaluation of usability and effectiveness of the Camera-Augmented mobile C-Arm system for acute shrapnel management.
Thanks to a double mirror system and a onetime calibration during the construction of the system, Camera Augmented Mobile C-arm provides co-registered X-ray and optical images. This allows dramatic reduction of X-ray exposure as well as better hand-eye coordination during orthopedics and trauma interventions. In December 2014, a recent prototype version of this system running on a mobile C-arm with 3D reconstruction capability was installed at LCSR, allowing JHU researchers to collaborate with Hopkins surgeons to develop augmented reality solutions for orthopedics and vascular surgery applications. The system is now available also for professional and public demonstrations within the Mock-OR at LCSR. Furthermore, Johns Hopkins’s Homewood Institutional Review Board has approved the evaluation of usability and effectiveness of the Camera-Augmented mobile C-Arm system for acute shrapnel management.